Signed in as:
filler@godaddy.com
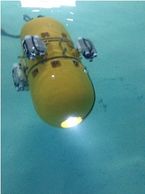
Our solution is a compact, self contained localization and mapping system for GPS denied environments, initially designed for offline inspection and maintenance of aboveground storage tanks, but adaptable to other GPS denied environments and online service.
Real-time processing capabilities allow the device to localize itself in a map of the tank’s interior that it creates and autonomously navigate in its environment. It is map-based and exploits the mathematics and signal processing of tank shape and topology - no external inputs are required.
An integrated range scanner is used for distance measurement and to determine orientation. It is precise to within centimeters or millimeters. Accuracy depends solely on the measurement accuracy of localization sensor components. Functionality has been validated in field trials in an empty storage tank.
This technology will facilitate future autonomous operations and can also be applied to in-service inspection and maintenance of other large assets with complex shapes, such as FPSO tanks and pressure vessels.

Localization Prototype
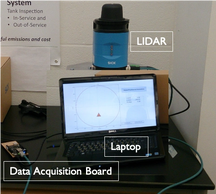
The basic system designed for proof of concept in lab conditions demonstrated mapping capability and localization accuracy within millimeters.

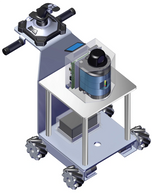
A localization prototype was adapted from the lab system for field trials with HMT, a major tank technology and inspection company. Algorithms were adjusted through the trials to accommodate real world conditions.
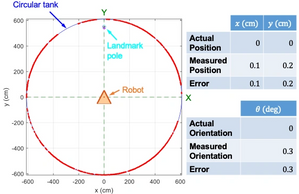
The prototype demonstrated the ability to map the inside of the tank and consistently achieved localization accuracy within millimeters, confirming lab results.

As a stand alone handheld device it can accurately identify the location of problem areas and return to the exact coordinates over time for data analytics and risk based inspection
Integrated with MFL inspection tools, inspection data can be synchronized with location and analyzed over time
In the future the localization technology will be adapted for use in other GPS denied environments as well as in-service and autonomous operations
A compact, commercial grade localization device is under development. It is designed to integrate with inspection systems and includes the following features: